为什么agent和workflow可以融合在同一个架构里?
2026-04-25
在今年,AI应用层的技术已经从workflow全面转向自主性agent。前者的典型代表是n8n、dify,后者的典型代表是OpenClaw、Hermes、CoWork。但是,未来的新技术肯定不是对旧技术的全盘否定或全盘肯定,而是有克制的「扬弃」。
我在上一篇介绍我们的新技术栈AmphiLoop的时候,引入了一种新的程序架构,称为「amphiflow」。Amphiflow是一种全新的、也是世界上第一个「决策与执行解耦」的架构,它同时具备workflow和agent两种运行模式,而且能够在两种模式之间自动切换。
今天借周末的时间,我们一起剖析一下这种架构背后的实现原理,并分析一下它如何能同时发挥两种模式的优势。
Amphiflow的工作方式
完成任何一个任务,都需要确定目标和路径两个因素。举个简单的例子:
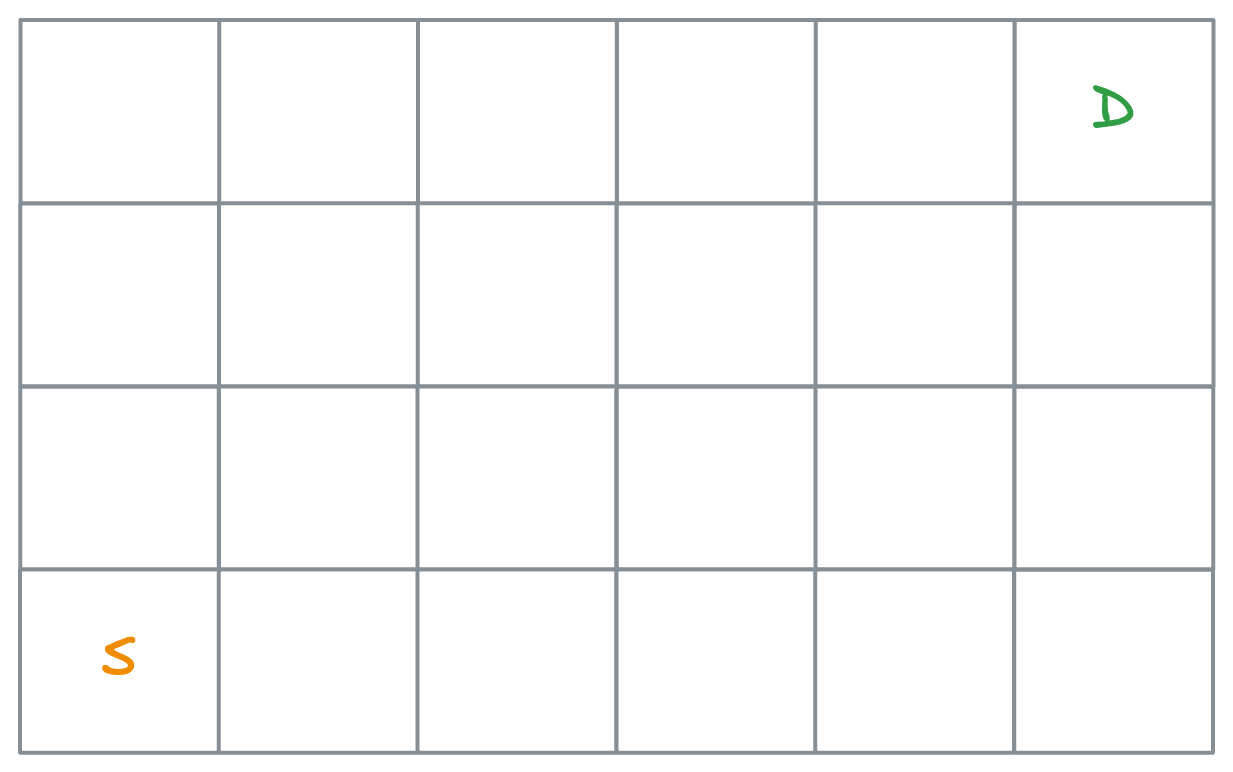
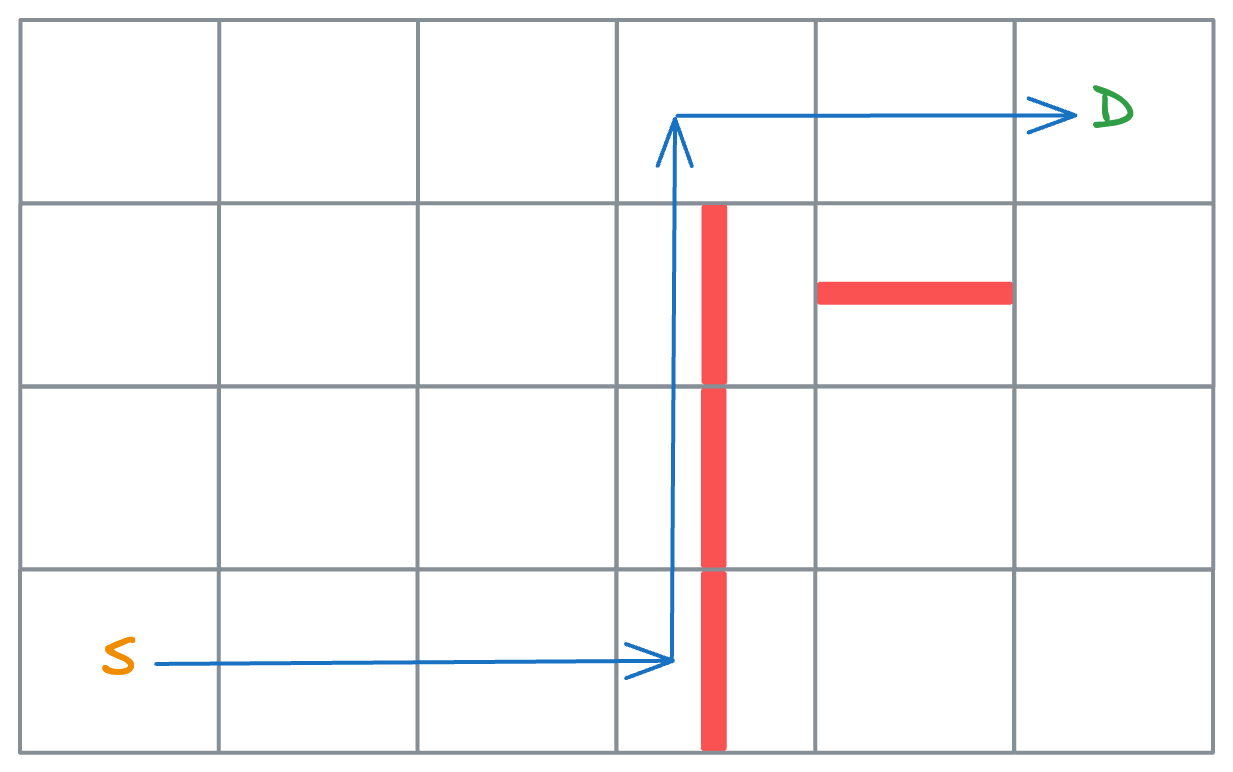
在上面的网格中,假设S点有一个机器人,它的任务目标是从S点走到D点。再假设这个机器人只能水平或垂直移动。
按照workflow模式(也是传统软件的思路),一般来说,我们需要在编程时指定具体的路径,机器人才能知道如何行动。如下:
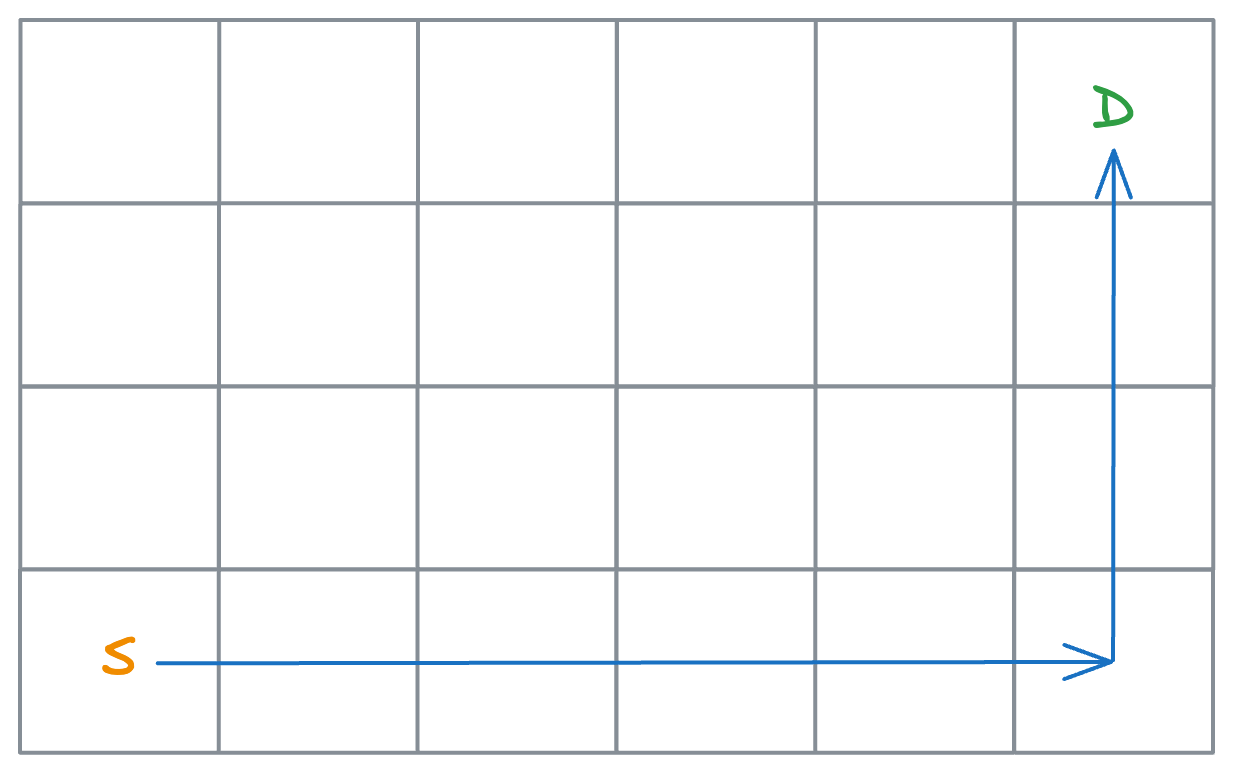
当然,从S到D不止一条路径。但我们的workflow只需要指出一条路径就行。
而按照自主agent模式,我们就没有必要提前指定一条路径。我们只需要指定任务的目标(也就是到达D点),然后LLM会自动找到路径。这也是当今AI Agent技术与传统软件的本质区别。更详细的讨论参见《AI Agent时代的软件开发范式》中提到的“编程范式的转变:从面向step到面向goal”。
现在假设机器人在沿着既定路径的移动过程中,碰到了一个预料之外的“障碍”(如下图红色挡板)。
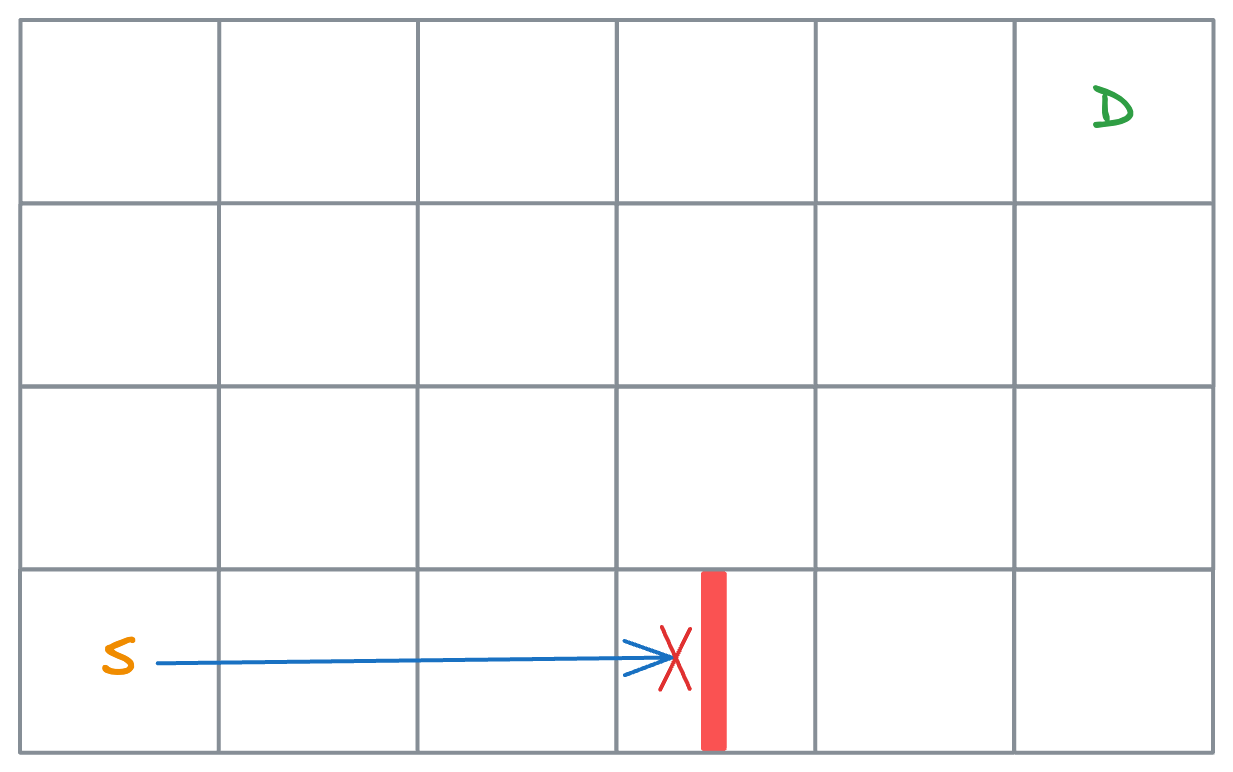
如果机器人是由workflow模式驱动,并且这个红色障碍是workflow编程时无法预期的,那么这时候就只有一个结果:任务失败。
但是,如果机器人在遇到障碍时转换成了agent模式,那么它可能会绕过去继续前进。如下图:
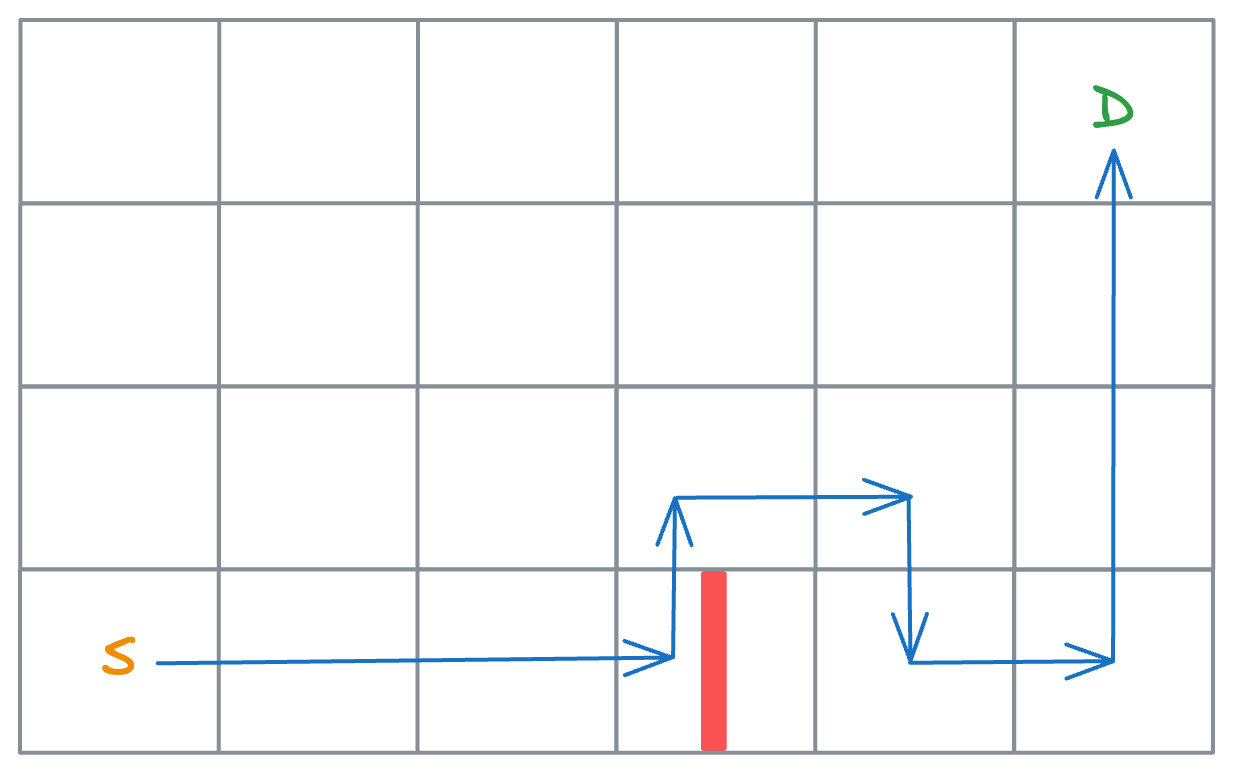
如果障碍实在远超预期,导致原来的路径已经完全不可用,agent模式还可能干脆重新规划一条路径。如下图:
以上这个例子虽然只是一个比喻,但已经说明了amphiflow最基础的工作原理:
- amphiflow首先工作在workflow模式。一旦碰到预料之外的障碍,某一步发生错误了,就切换到agent模式。在agent模式下,可能产生两个降级。
- 先是尝试小降级。它会试图「修复」当前这一步的错误。如果它能够以agent模式正确完成当前这一步,那么就重新切换回workflow模式,继续向下运行(对应前面碰到障碍绕过去的情况)。否则,在多次修复尝试失败后,会进入大降级。
- 大降级:程序整体切换到一个大的agentic loop,完全以agent模式来尝试完成原始的task goal(对应前面重新规划出一条路径的情况)。当然,它会考虑原来workflow已经完成的部分,在这个基础上去执行剩下的动作。
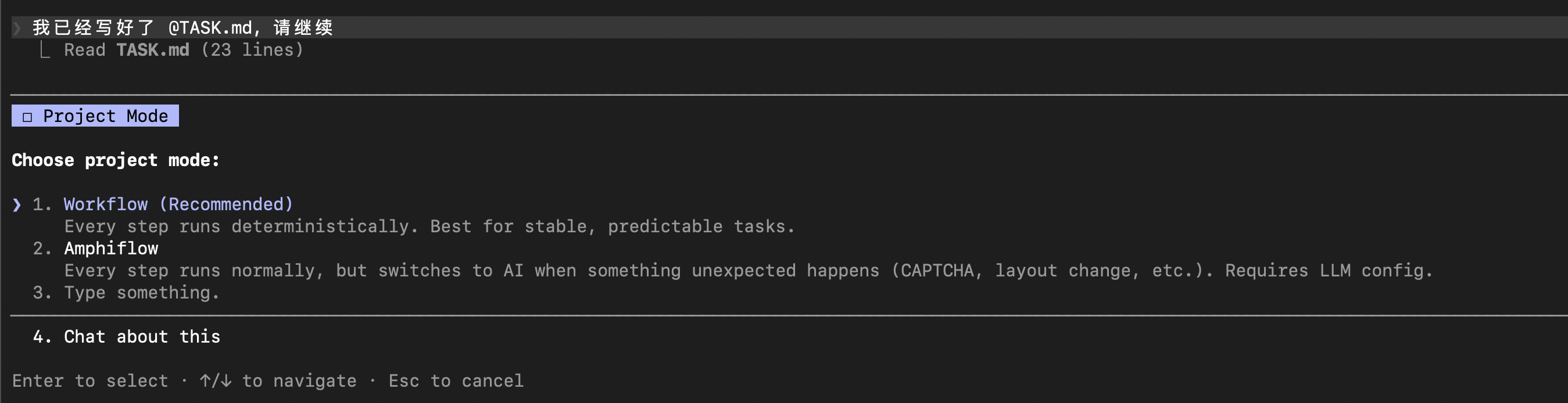
在使用AmphiLoop进行构建的时候,在Project Mode这一步选择2,就能生成amphiflow架构的程序。如下:
当然,上面的介绍中忽略了一些细节。Workflow模式也并非在编程时一定要指定具体的路径,它也可以包含一个动态的算法来动态计算出一条路径。但这里的关键在于:对于workflow模式来说,如果执行路径中出现的障碍是它非预期的,它就无法解决。但是,agent模式却可以处理非预期的障碍或情况。
Amphiflow的优势
Amphiflow可以同时具备workflow和agent两种模式的优势:
- 在预期范围之内运行时,使用workflow模式,稳定、可控,不依赖LLM,节省token。
- 当发生预期之外的环境变化时,切换到agent模式,自主应对非预期情况,绕过障碍或者通知人类解决障碍。
正是因为这一新架构同时具备workflow和agent模式的特征,所以才被称为amphiflow (amphibious flow)。
Amphiflow的实现原理
要讲清楚amphiflow的实现原理,有两个方面需要解释:
- workflow模式和agent模式是怎么融合到一起的?
- 在workflow模式出错的时候,又是怎么切换到agent模式的?
其中问题1,又需要涉及到两个概念:
- 「观察 - 思考 - 行动」循环,即Observe-Think-Act cycle。在AmphiLoop的架构中,两种运行模式都可以统一归结到这个循环上。它们共享观察 (Observe) 与行动 (Act) ,但是思考过程 (Think) 则各自独立。
- 决策与执行解耦,即Decoupling Decision from Execution。在AmphiLoop的架构中,两种运行模式各自独立的Think产生独立的Decision。
这里涉及到的核心实现代码,基本都在bridgic-amphibious模块的_amphibious_automa.py文件中。地址:
https://github.com/bitsky-tech/bridgic/blob/main/packages/bridgic-amphibious/bridgic/amphibious/_amphibious_automa.py
「观察 - 思考 - 行动」循环
agent模式看做一个循环,这通常是好理解的:
- 观察:把观察到的原始数据加工成适合思考的形式。这一步也可以认为是一个「感知」过程。
- 思考:产生一个决策(decision),以决定下一步如何行动。对于agent模式来说,这个decision由LLM产生。这一步也可以认为是一个「认知」的过程。
- 行动:调用工具,对环境产生影响。
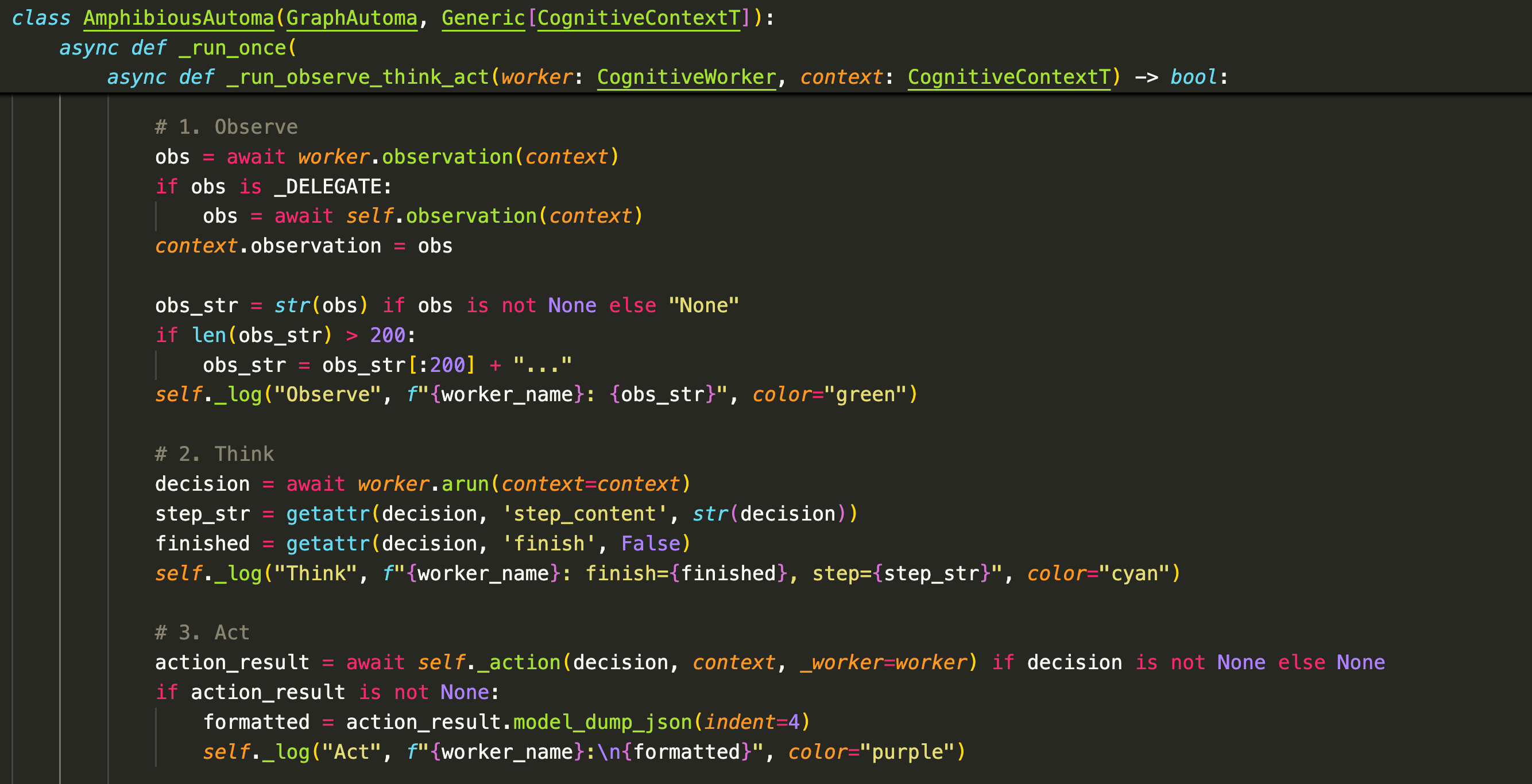
agent模式的这个「观察 - 思考 - 行动」循环,实现代码在_run_once方法中:
在AmphiLoop的架构中,比较独特的一点是,workflow也实现成了一个「观察 - 思考 - 行动」循环。如何做的呢?首先,观察和行动,是跟agent模式一样的,代码在_run_workflow方法中:
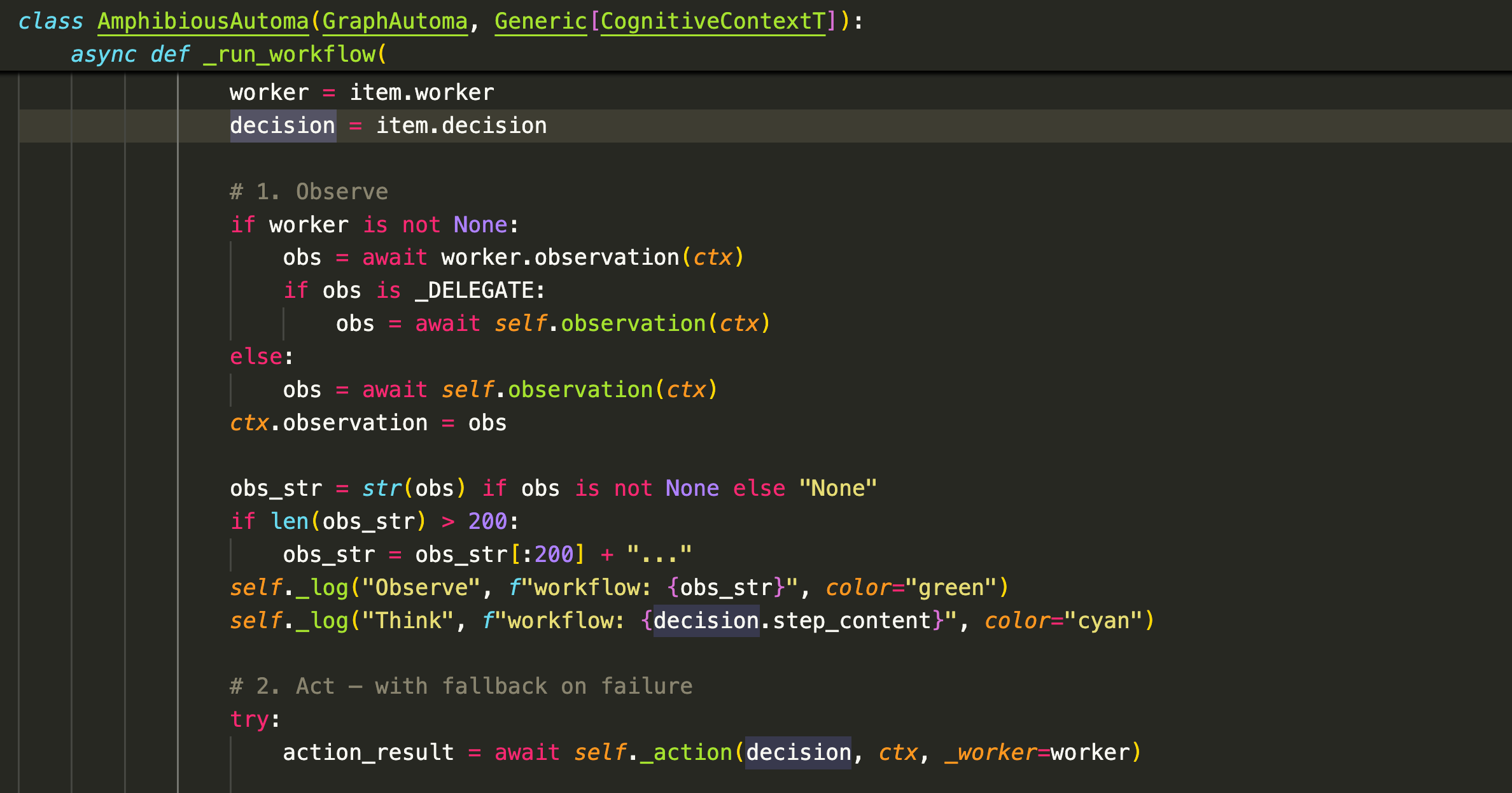
注意上面代码中只有观察和行动这两步,其中有个很关键的decision变量,它不再由LLM产生,而是由workflow产生。代码如下:
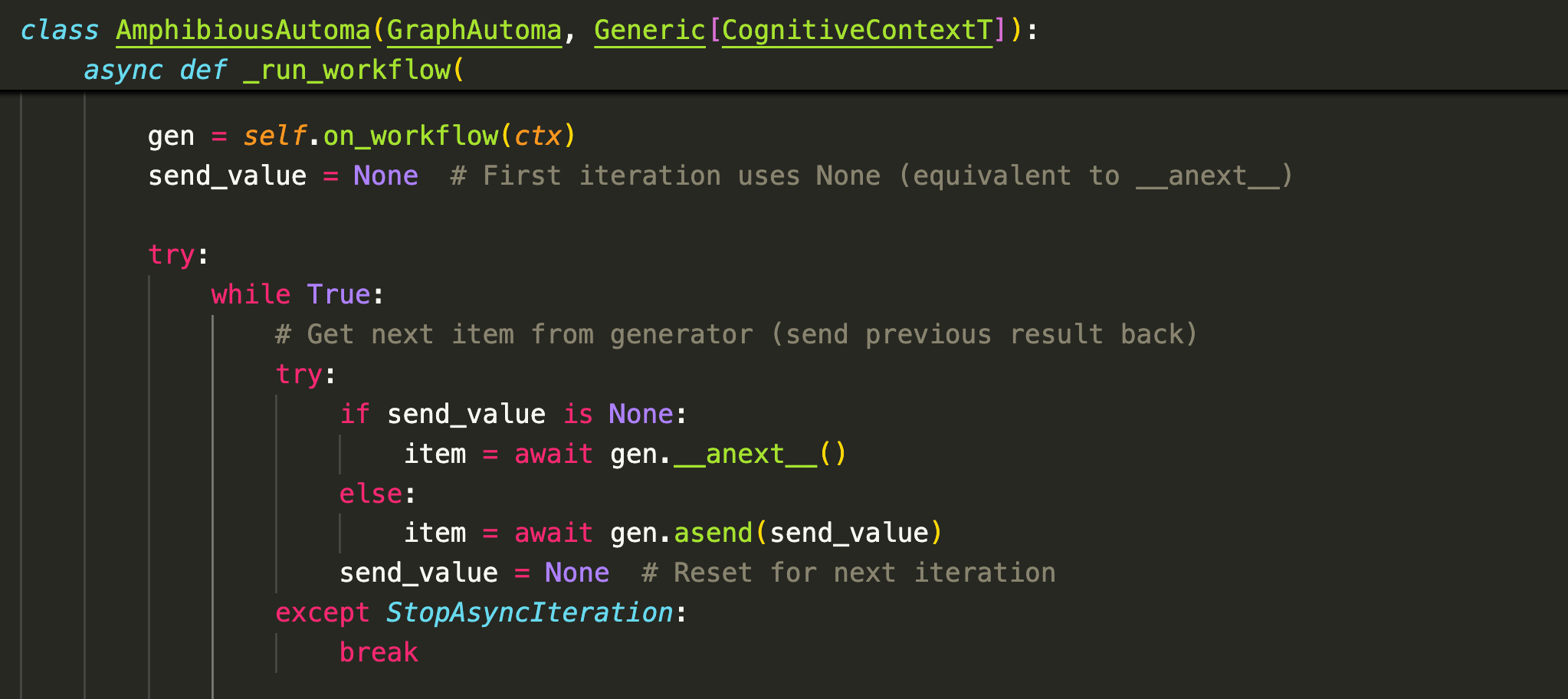
以上这段代码调用on_workflow产生一个generator,然后在一个循环中调用__anext__和asend原语从generator中每次拿到一个item(里面包含了item.decision)。这个循环就形成了workflow模式的「观察 - 思考 - 行动」循环。
决策与执行解耦
前面我们看到了workflow模式的「观察 - 思考 - 行动」循环。其中的「思考」过程由workflow的代码隐式地表达。我们看一下on_workflow的一个具体实现例子:
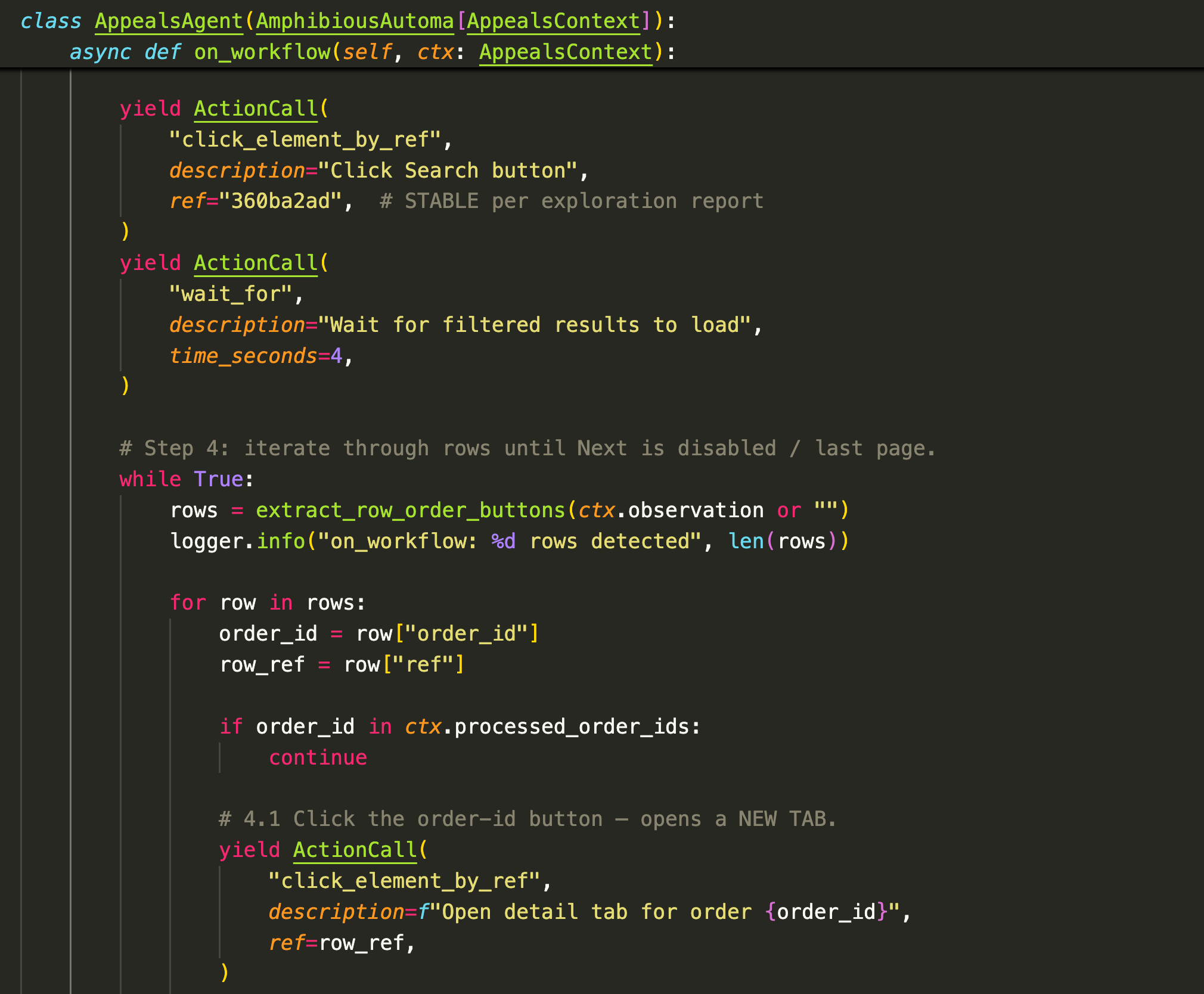
这段代码并非AmphiLoop框架里面的代码,而是每次由AmphiLoop根据具体任务描述(TASK.md)引导生成的代码。因此,on_workflow描述了具体任务的执行步骤。
这里使用了python的yield语法,表示on_workflow方法执行的时候并不代表任务的真正执行。真正的执行延迟到了前面的_run_workflow方法中由_action方法执行。借助这种技术手段,workflow的执行也表现为一个「观察 - 思考 - 行动」循环。每次循环产生一个decision(封装在ActionCall中)。
还需要注意的是,这段代码中不仅仅是ActionCall动作序列,它还可以包含动态逻辑(分支和循环),比如上面代码中的for循环。这表明AmphiLoop的workflow不同于简单的录制重放,而是真正的动态程序。
运行模式的切换
基于前面的「观察 - 思考 - 行动」循环以及决策与执行解耦的架构,workflow模式得以在出错时能够自动切换到agent模式。
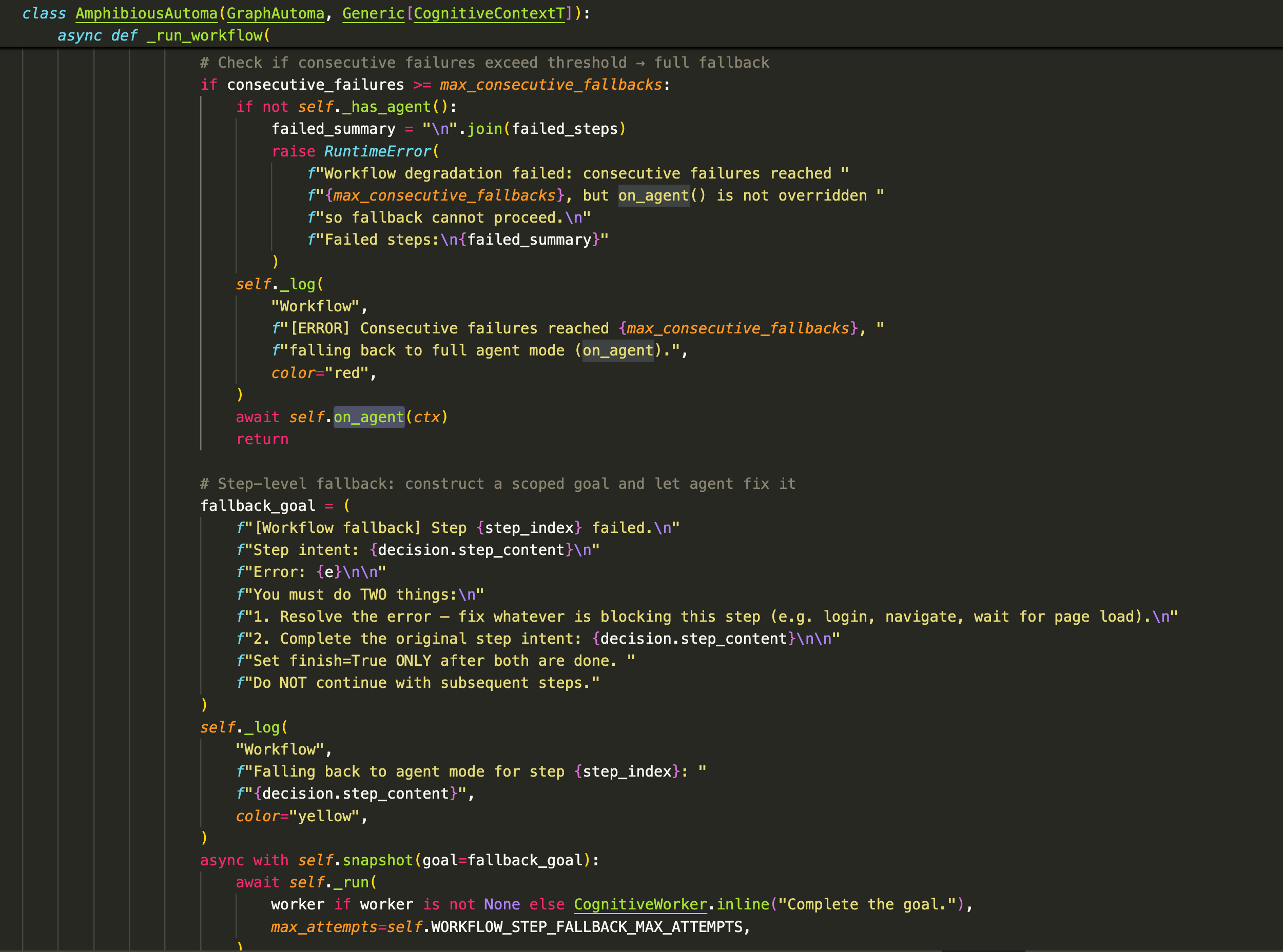
以上代码中,self.snapshot和self._run是小降级,相当于在独立的上下文中执行一个agent。其目标是:修复出错的那一步的错误,然后执行它(这里的decision.step_content来自前面的ActionCall的description参数)。这样在修复后还可以切换回workflow模式继续执行。
self.on_agent(ctx)是大降级,相当于启动一个agent,其目标即是原始任务目标,且与原来的workflow共享上下文。
小结
AmphiLoop及其引入的amphiflow架构,是基于agent的自主性优势和传统软件的确定性优势推演出来的未来架构。它瞄准的是当今AI技术不可控、不稳定、极耗token的核心问题,理论上有利于推动AI技术在更广、更加纵深的场景中被采用。
社区交流
(1)我们新建了一个Discord社区,请访问如下地址参与讨论:
由于微信群维护不方便,也请原来在群里的同学移步Discord。
(2)新的X (Twitter) 账号(后面是发布版本更新动态的主阵地):
(正文完)
其它精选文章:
- 两栖模式构建Agent,与OpenClaw/Hermes不一样的解法
- 【开源】专为「探路+编码」范式设计的全新浏览器工具集+Skills
- 过年了,聊聊AI和人文
- AI智能体纪元或将从2026开始归零
- 【开源】我亲手开发的一个AI框架,谈下背后的思考
- AI Agent时代的软件开发范式
- AI Agent的概念、自主程度和抽象层次
- 科普一下:拆解LLM背后的概率学原理
- 分布式领域最重要的一篇论文,到底讲了什么?
原创文章,转载请注明出处,并包含下面的二维码!否则拒绝转载!
本文链接:http://zhangtielei.com/posts/blog-amphiflow_implementation.html
欢迎关注我的个人微博:微博上搜索我的名字「张铁蕾」。

最新文章
- 为什么agent和workflow可以融合在同一个架构里?
- 万字长文!两栖模式构建Agent,与OpenClaw/Hermes不一样的解法——开源AmphiLoop
- Claude Managed Agents意味着什么?
- 【开源】专为「探路+编码」范式设计的全新浏览器工具集+Skills
- 不用手写一行代码,10分钟立等可取,爬取twitter和github动态
- 使用OpenClaw时如何降低token消耗?分享一个浏览器自动化的skill
- 过年了,聊聊AI和人文
- 使用Bridgic长程自主模块+MCP,控制你的浏览器
- AI智能体纪元或将从2026开始归零
- 从Python异步编程的剖析中体会智能体并发编程模式